|
STAUBLI TX-40 6-AXIS ROBOT CELL WITH GRINDER ATTACHMENT, Staubli robot cell, Robot Grinding Cell

Staubli TX-40 6-Axis Robot Cell with Grinder Attachment
Stock # Q10484
|
|


ACTUAL PHOTOS
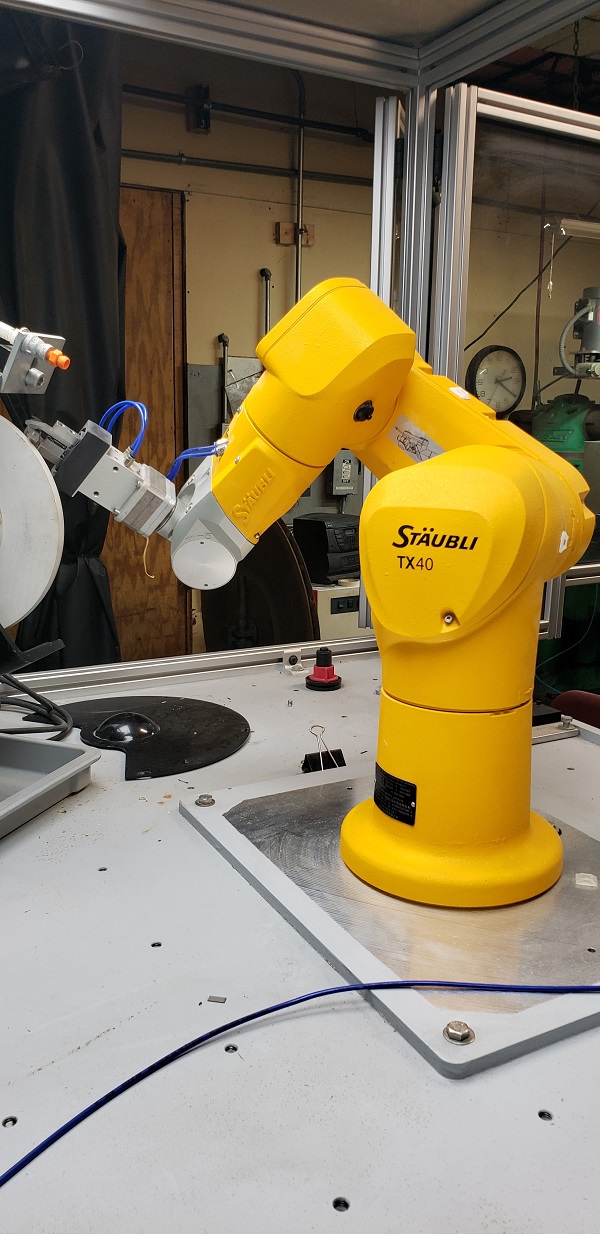
STAUBLI TX-40 6-AXIS ROBOT CELL WITH GRINDER ATTACHMENT
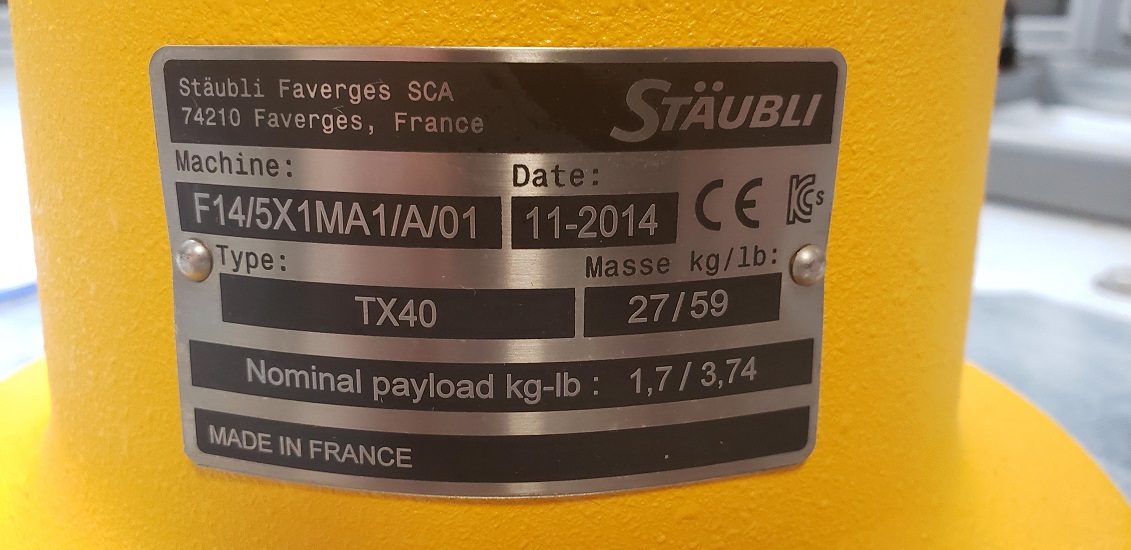
S/N F14/5X1MA1/A/01, New 11/2014
Stock # Q10484
EQUIPPED WITH:
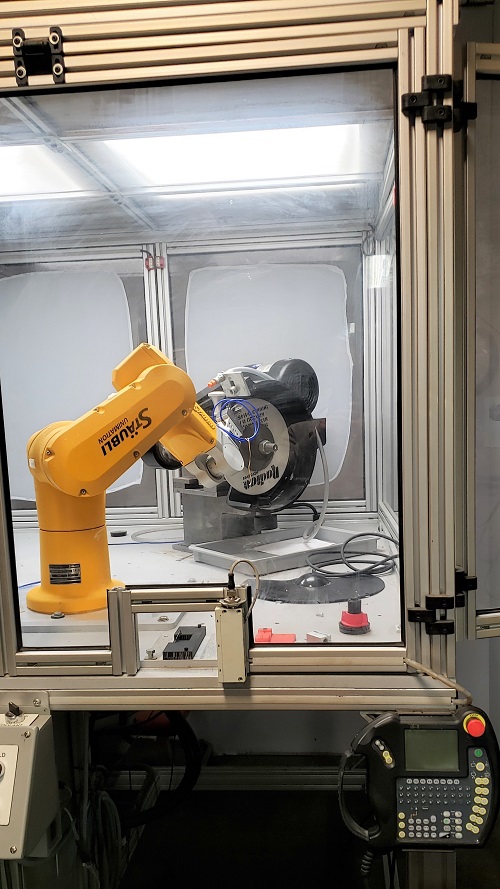
6 AXIS ROBOT With Grinder Attachment originally designed to grind medical scalpels,
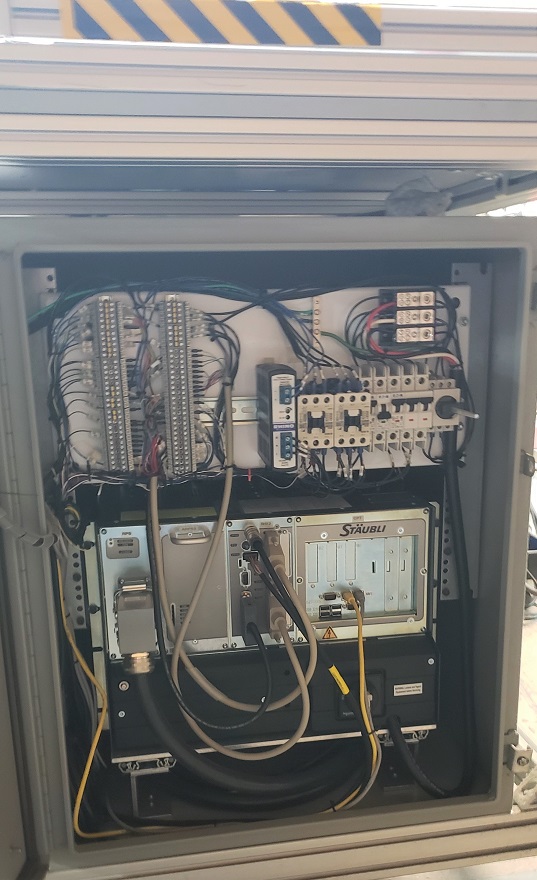
CS8C Controller, 1 HP Dumore Grinder with 10" Wheel Bolted to Table of Cell with Coolant,
Full Enclosure.
SPECIFICATIONS WHILE OBTAINED FROM SOURCES DEEMED
RELIABLE ARE SUBJECT TO CHANGE WITHOUT NOTICE
AND TO VERIFICATION BY BUYER:
ROBOT SPECIFICATIONS:
Maximum load......................................................... 2.3 KG
Nominal load........................................................... 1.7 KG
Reach (between axis 1 and 6)................................ 515 mm
Number of degrees of freedom............................... 6
Repeatability.............................................................ISO 9283 0.02MM±
RANGE OF MOTION:
Axis 1 (A)................................................................ ± 180°
Axis 2 (B)................................................................ ± 180°
Axis 3 (C)................................................................ ± 138°
Axis 4 (D)................................................................ ± 270°
Axis 5 (E)................................................................ +133,5°/-120°
Axis 6 (F)................................................................ ± 270°
WORK ENVELOPE:
Maximum reach between axis 1 and 5 (R. M)....... 450 mm
Minimum reach between axis 1 and 5 (R. m1)...... 151 mm
Minimum reach between axis 2 and 5 (R. m2)...... 162 mm
Minimum reach between axis 3 and 5 (R. b)......... 225 mm
MAXIMUM SPEED:
Axis 1..................................................................... 555°/s
Axis 2 .................................................................... 475°/s
Axis 3..................................................................... 585°/s
Axis 4..................................................................... 1035°/s
Axis 5..................................................................... 1135°/s
Axis 6..................................................................... 1575°/s
Maximum speed at load gravity center.................. 8.2 M/S
MAXIMUM INERTIAS:
Axis 5 .................................................................... 0.1 kg.m2
Axis 6 .................................................................... 0.03 kg.m2
Overall Robot Weight............................................. 27 KG
Brakes All axis
FOREARM CONNECTIONS:
Pneumatic:
2 direct lines between the base and the forearm
1 optional solenoid valve 5/2-way (compressed air) or 3/2-way (vacuum) monostable
Electrical:
1 female 8-contact socket (2 shielded twisted pairs, 3 power contacts)
Cleanroom standard - ISO 14644-1
Protection class (*wrist) according to standard NF EN 60529 IP65 (*67)
Stäubli CS8 series controller CS8C
CONDITION: This machine is in Excellent Condition, Hardly Used. Originally made to Grind Medical Scalpels.
|
 |
|
